Donnée de l'IGN pour chaque point:
intensity: pourcentageClassification:
- Never Classified
- Unclassified
- Ground
- Low Vegetation
- Medium Vegetation
- High Vegetation
- Building
- Water
- Bridge Deck
- Class 67
maplibre-gl-lidar
la librairie intègre toute la pipeline.
On fournit le fichier laz brut de l'ign en entrée.
- reprojection
- conversion en tuile 3d
- création d'une couche custom compatible MapLibre via Deck.gl
c'est presque trop car on a un monolithe pas très flexible.
Important
maplibre-gl-lidar intègre la librairie laz-perf qui possède du web assembly via un import bizarre. Grosse incompatibilité avec vite qui optimise les dépendances en les changeant de dossier node_modules/.vite/deps, le chemin est cassé. Impossible de faire un build pour le poc sous react-router (environnement hybride avec ssr).
Pour pouvoir fonctionner actuellement, j'ai été obligé de hard coder la librairie (cela empêche vite de lancer son dependency pre-bundling).
Pas viable mais ok pour poc.
monolithe limitations : Exemple 1
le code d'intégration ne met pas en avant les layers MapLibre utilisés par la librairie. (pas de commande d'ajout implicite map.addLayer seulement un map.addControl).
const lidarControl = new LidarControl({
title: "LiDAR Viewer",
collapsed: true,
pointSize: 2,
colorScheme: "classification",
zOffset: 0,
terrainEnabled: false,
});
map.addControl(lidarControl, "top-right");
lidarControl.loadPointCloud(
"https://vecmilmaps-public-data.deliastrat.pentatrion.com/3d-tiles-threejs/crest.copc.laz",
);
On retrouve notre import dans une méthode privée du PointCloudManager.
Ce sera compliqué lors d'une intégration poussée dans une app complète. Comment permettre le zOrder de cette couche si on n'a pas la main dessus.
class PointCloudManager {
private _createLayer(id: string): void {
// some code
this._deckOverlay.addLayer(`pointcloud-${id}-chunk${chunk}`, layer);
}
}
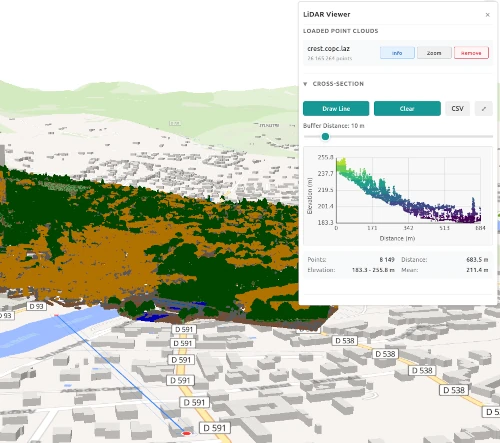
monolithe limitations : Exemple 2
La librairie accepte une option pour afficher le relief 3d. Ils n'ont pas porté leur choix sur mapterHorn, du coup si on ne fait pas les mêmes choix techniques qu'eux, la librairie est bancale.
Voir exemple ci-dessous ou on utilise MapterHorn pour l'élévation. Lorsqu'on trace une ligne, leur fonctionnalité de cross-section ne prend pas en compte l'élévation et la ligne en bleu apparait dessous (-180 m en dessous de crest qui est à une altitude de 180m)
Conclusion
Excellente source d'inspiration pour une pipeline complète.
- import à la volée, pas besoin de conversion préalable.
- outils avancés notamment la colorisation personnalisable, la cross-section.
le point noir étant le manque de flexibilité de la librairie. Utilisée dans un projet vide c'est super, dès lors qu'on a des contraintes, on va se retrouver bloqués.